
开发环境:
IDE:RT-Thread Studio 2.1.5
开发板:GD32407V-START
很多朋友在调试的时候,都喜欢使用串口来调试。毕竟简单嘛,GD32的串口资源非常丰富,笔者已经完成了GD32不同系列的串口驱动,大家可以直接使用。
4.1 RT-Thread 的UART简介
UART和其他设备一样,应用程序通过统一的设备管理接口来访问串口硬件,相关接口如下所示:
| 函数 | 描述 |
|---|---|
| rt_device_find() | 查找设备 |
| rt_device_open() | 打开设备 |
| rt_device_read() | 读取数据 |
| rt_device_write() | 写入数据 |
| rt_device_control() | 控制设备 |
| rt_device_set_rx_indicate() | 设置接收回调函数 |
| rt_device_set_tx_complete() | 设置发送完成回调函数 |
| rt_device_close() | 关闭设备 |
关于API的详细描述请参看官网手册:
UART API
UART的主要步骤如下所示:
1.首先查找串口设备获取设备句柄。
2.配置串口参数。
3.初始化回调函数发送使用的信号量,然后以读写及中断接收方式打开串口设备。
4.设置串口设备的接收回调函数,之后发送字符串,并创建读取数据线程。
运行序列图如下图所示:
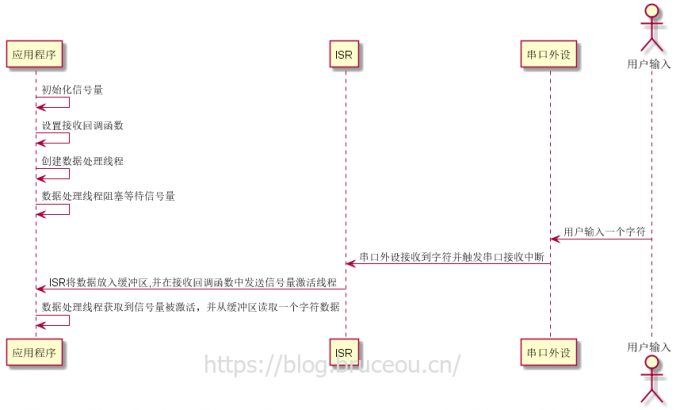
上述方式是基于中断实现的,当然也可使用DMA,目前UART驱动还不支持,待以后完善吧。
4.2 UART使用实例
笔者这里使用的是GD32407V-START开发板,GD32407V-START的有6路串口,均通过引脚引出,UART1已经用作调试口,因此笔者这里使用UART2演示。
首先看下电路图:

串口2使用的是PB10和PB11。
只需要简单配置就可使用,当然也可使用其他串口。
在applications文件夹下新建task.c文件。核心代码如下:
[task.c]
/**
******************************************************************************
* @file task.c
* @author BruceOu
* @lib version V3.5.0
* @version V1.0
* @date 2022-01-31
* @blog https://blog.bruceou.cn/
* @Official Accounts 嵌入式实验楼
* @brief RTT任务
******************************************************************************
*/
/*Includes**********************************************************************/
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#define SAMPLE_UART_NAME "uart2" /* 串口设备名称 */
struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT; /* 初始化配置参数 */
/* 用于接收消息的信号量 */
static struct rt_semaphore rx_sem;
static rt_device_t serial;
/**
* @brief uart_input //接收数据回调函数
* @param dev
* size
* @retval RT_EOK
*/
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{
/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
/**
* @brief serial_thread_entry
* @param parameter
* @retval None
*/
static void serial_thread_entry(void *parameter)
{
char ch;
while (1)
{
/* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */
while (rt_device_read(serial, -1, &ch, 1) != 1)
{
/* 阻塞等待接收信号量,等到信号量后再次读取数据 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
}
/* 读取到的数据输出 */
rt_kprintf("%c",ch);
}
}
/**
* @brief thread_serial
* @param None
* @retval ret
*/
int thread_serial(void)
{
rt_err_t ret = RT_EOK;
char uart_name[RT_NAME_MAX];
char str[] = "hello RT-Thread!\r\n";
rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX);
/* 查找系统中的串口设备 */
serial = rt_device_find(uart_name);
if (!serial)
{
rt_kprintf("find %s failed!\n", uart_name);
return RT_ERROR;
}
/* 修改串口配置参数 */
config.baud_rate = BAUD_RATE_115200; //修改波特率为 115200
config.data_bits = DATA_BITS_8; //数据位 8
config.stop_bits = STOP_BITS_1; //停止位 1
config.bufsz = 64; //修改缓冲区 buff size 为 128
config.parity = PARITY_NONE; //无奇偶校验位
/* 控制串口设备。通过控制接口传入命令控制字,与控制参数 */
rt_device_control(serial, RT_DEVICE_CTRL_CONFIG, &config);
/* 初始化信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及轮询发送模式打开串口设备 */
rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);
/* 设置接收回调函数 */
rt_device_set_rx_indicate(serial, uart_input);
/* 发送字符串 */
rt_device_write(serial, 0, str, (sizeof(str) - 1));
/* 创建 serial 线程 */
rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
/* 创建成功则启动线程 */
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
ret = RT_ERROR;
}
return ret;
}
/* 导出到 msh 命令列表中 */
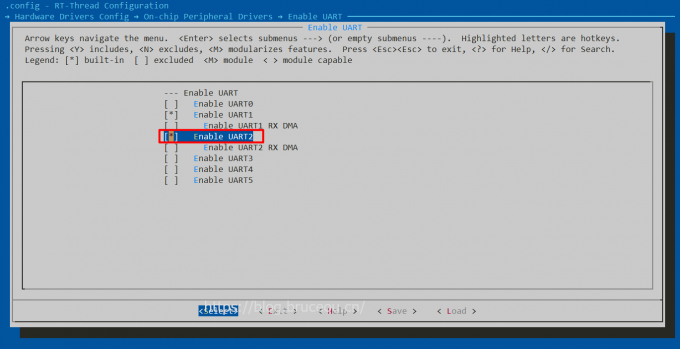
MSH_CMD_EXPORT(thread_serial, uart device sample);编译下载,调试信息如下:

从以上打印信息可以看出,串口2已经使能,然后使用MSH命令‘thread_serial’即可使能串口线程。
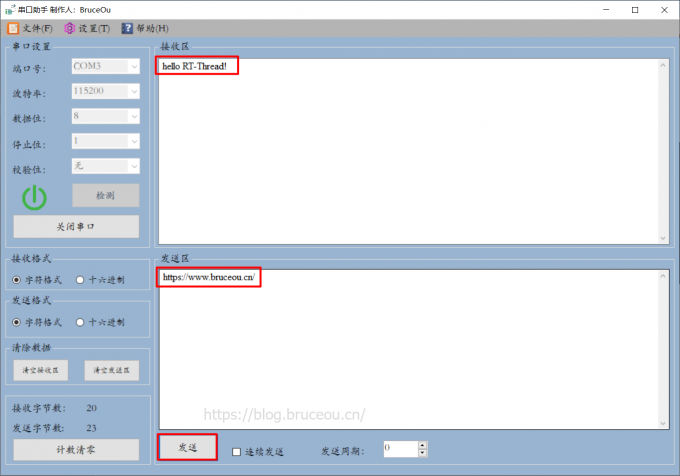
使能串口线程后,串口2将打印‘hello RT-Thread’,用户也可通过串口2发送数据到开发板,发送信息后,调试终端即可看到串口2发送的数据。
资源获取方式
1.关注公众号[嵌入式实验楼]
2.在公众号回复关键词[GD32应用开发实战指南]获取资料提取码